Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Text práce
September 2010 - Evanjelická cirkev metodistická
Evolučné algoritmy
ÚVOD TYP FOTENIA
Časopis leto 2013 PDF - Klub zdravia Walmark
Referenčný list
Diplomová práca - Žilinská univerzita
MANUFACTURING TECHNOLOGY
Uživatelská příručka
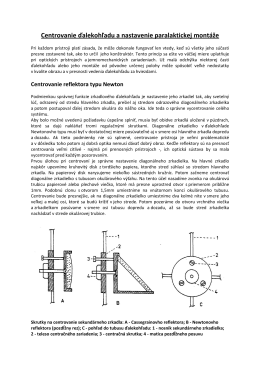
Centrovanie ďalekohľadu.pdf
kniha 3r CNC.pdf
TEORIE SYSTÉMŮ - Personalizace výuky prostřednictvím e
diplomovka-final - Univerzita Komenského
A Portable Setup for Fast Material Appearance Acquisition
Novinky od firmy Slovaktual
Digitálna fotografia: Základné princípy optiky a svetla
Events Calendar 2016-2017
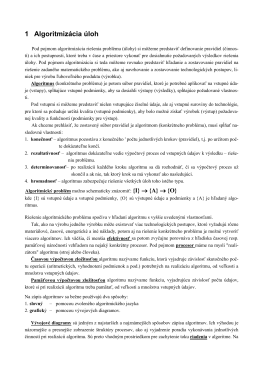
1 Algoritmizácia úloh
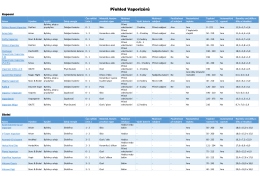
ZDE. - KvalitniVaporizer.cz