Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
null
Magisterská práce ke stažení - Katedra geoinformatiky
sayısal fotogrametri
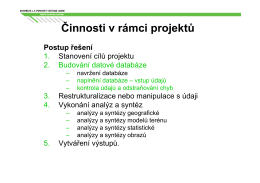
Geometrické plány jako podklad pro převody nemovitostí (1)
učební text
BL?.1- BL?/.
Měření deformací betonového nosníku III během zátěžové zkoušky
null
GEUS 19.0 výpočetní část
ZPRACOVÁNÍ DIGITALIZOVANÉHO OBRAZU
Guidelines for accepted papers (oral and poster)
Fotogrammetrie.pdf
Bydlení ve finském stylu www.yitkoti.cz
zde - Egako
Vypracované teor. otázky (PDF)
Metody mapovani vyskopisu drive a nyni_T.pdf
Neměřické kamery v blízké fotogrammetrii - IGDM
DMC
Přednáška 3
Vrchní referent/rada v oddělení aktualizace KN.
Vypisování výběrových řízení v geooborech
Podrobné polohové bodové pole (1)
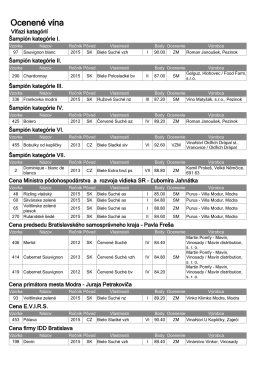
Výsledky súťaže Vitis Aurea Modra