Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
obecně o Počítačovém vidění
Historicky největší robot od ABB
OpenAlt Konvoluční neuronové sítě
รายงานการวิจัยฉบับสมบูรณ์ ระบบตรวจจับใบหน้า
Na mape uz neni misto Pavel Machek
CorelDRAW: Ilustrace a návrh knižní obálky
zpráva_z_utkání_8_-_FK_FK Slavoj Vyšehrad s.r.o
Konwergencja - OHIM
KIV/PIA – Semestrální práce Diskuzní fórum
2.1. Izrada web korisničkog interfejsa za multimodalni
Samoorganizujúce sa mapy
Mario Livio
Stanovisko Unie psychologických asociací ČR k metodě barvových
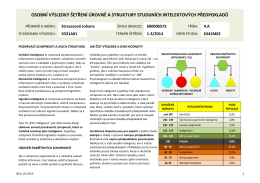
osobní výsledky šetření úrovně a struktury studijních intelektových
BH223 prospekt zde
2/2010 - KST ČR - Komora soudních tlumočníků
Synek_Didaktika hudebni vychovy 1.pdf
Zařízení pro vyhledávání wifi sítí v pásmu 5GHz Stručný popis
03703 brožura bizhub 20_krouzkova.indd
Přeinstalace z Win XP
Protokoly síťových architektur WAN sítí (X.25, Frame Relay, ISDN
CPR Asset Management to become Amundi`s centre of
Aplikace neuronových sítí v OCR - Ostravská univerzita v Ostravě