Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
predkorekcia v elektrických pohonoch – pravidlá a limity
View/Open
Servosystémy Juraj
1.1.1. Metóda bilineárnej transformácie
PR10 Polohový servosystém s generátorom momentu
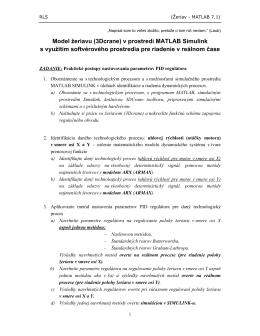
Model žeriavu (3Dcrane) v prostredí MATLAB Simulink s využitím
úvod do riadenia elektrických servopohonov s pružným
vnútorné metodické usmernenie na hodnotenie a klasifikáciu žiakov
ระบบบัญชีแยกประเภท ผ่าน GFMIS Web Online
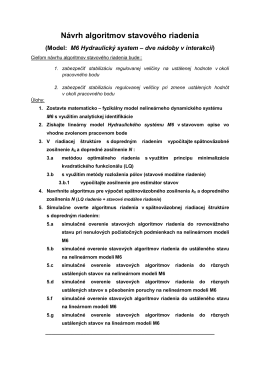
Návrh algoritmov stavového riadenia
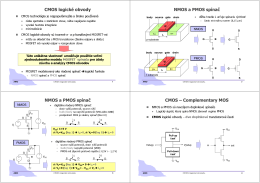
CMOS logické obvody NMOS a PMOS spínač NMOS a PMOS
Zdeněk Dostál - Žilinská univerzita
7 2. ZÁKLADY ELEMENTÁRNEJ TEÓRIE