Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
การปรับจูนตัวควบคุมพีไอดีตามข้อกําหนดในโดเ
วิธีเส้นทางเดินของราก
Document
Chapter 2
การออกแบบตัวควบคุมพีไอดีเอแบบเหมาะสมที่สุด
การบ้านบทที่ 5 การพล็อตทางเดินราก (Root locus)
2102331: การทดลองระบบควบคุมป อนกลับ ห องปฏิบัติกา
ระบบควบคุม
การควบคุม แบบคงทนสำาหรับการหน่ว งระบบไฟฟ้าก
Chapter 1 Introduction_R1
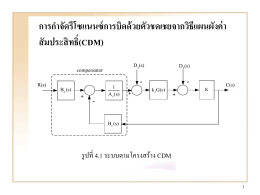
การกำจัดรีโซแนนซ์การบิดในระบบคู่ควบเชิงกล torsional resonance
10 ตัว
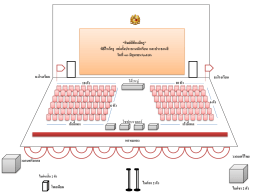
ผังบนเวที พิธีถวายพระพรสมเด็จพระนางเจ้าพระบรมราชินีนาถ วันที่ 9