Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
การประมาณแรงบิดโหลดที่กระทําบนข้อต่อของแขน
การควบคุมระดับความลึกของหุ่นยนต์ด าน ้าแบบอ Au
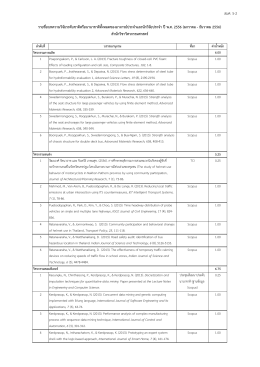
สมศ. 5-2 รำยชื่อบทควำมวิจัยระดับชำติหรือนำนำชำ
การจำลองการควบคุมแขนกลหุ่นยนต์แบบปรับตัว (Simulation
เกณฑ ในการพิจารณาใช มาตรการประหยัดพลังงานต าง ๆ
การควบคุมความยืดหยุ่นแขนกลแบบ 3 แกน
Design of controllers for an electronics throttle valve
การจัดการกับอาการกลืนลำบากในผู้สูงอายุโรคหลอดเลือดสมอง
การประยุกต์ใช้การประมวลผลภาพส าหรับแขนกลไขน
กลุ่มหุ่นยนต์ร่วมกันในการเคลื่อนย้ายวัสดุ โ
Document