Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
การชดเชยค่าความผิดพลาด - คณะวิศวกรรมศาสตร์
หุ่นยนต์อุตสาหกรรมในแบบที่ควรเป็น ใช้งานง่า
ณัฐพร ฤทธิ์นุ่ม - มหาวิทยาลัยหอการค้าไทย
การสร้างลบบจ้าลองทางคณิตศาสตร์ของการเคลื่อ
V-Watch - Objective
สนท.010025 การปลูกถั่วมะแฮะเพื่อผลิตเมล็ดพันธุ์แ
A Portable 3D Coordiante Measuring Machine
หุ่นยนต์อ่ตสาหกรรมในแบบที่ควรเป็น
การออกแบบและสร างแขนกลสองแขนกั้นรถยนต ที่ค
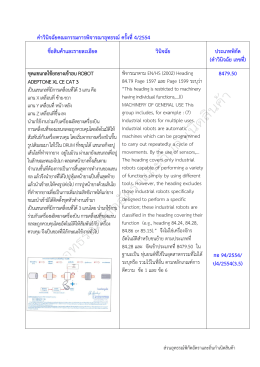
ตัวอย่างเนื้อหา - สำนักวิชาการและมาตรฐานการศึกษา
รู้จักกับ
กอ 94/2554/ป4/2554(3.5)
3 - Read Me Egazine by TK park