Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
이동로봇의 직접교시를 위한 가변 임피던스제어와 퍼지추론 기반
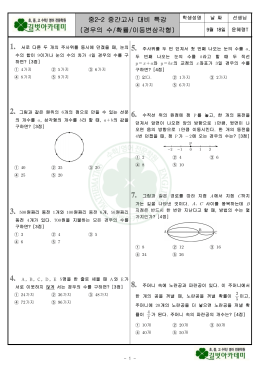
길벗아카데미 2016년 중2수학 경우의수_확률_이등변
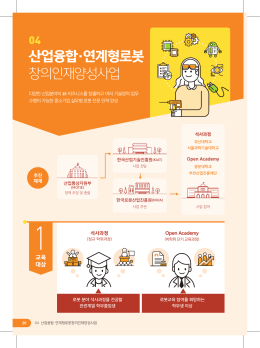
창의인재양성사업 - 산업기술인력 통합정보망
7. 집단의사결정 - kocw.net