Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
PowerPoint Sunusu - İstanbul Teknik Üniversitesi
Kampüste Yaşam - Tapu ve Kadastro
Kampüste Yaşam - Tapu ve Kadastro
Kampüste Yaşam - Harita ve Kadastro
poster(TR) - İstanbul Teknik Üniversitesi
İndir - Harita ve Kadastro
RAHM˙I EL˙IBOL
Üstün Olma Niteliğini Kazanma
Hakan Geren, Gözde DURUL
PRZYKŁADY WYWIADÓW W RÓŻNYCH ODMIANACH Wywiad
Sinirbilimde Hesaplamalı Modeller ve Benzetim Araçları
Erdal DAĞTAŞ & Mehmet Emir YILDIZ Türkiye`de
Topoloji
GRAFİK TASARIMI KAYNAKÇALARI 1. GENEL SANAT TARİHİ (10
bausem logo kullanım klavuzu
Curriculum Vitae - School of Medicine
domain alan adları ve hesaplarının haczi
Ders1-Temel_Kavramlar (Ders Notu)
sözlü sunum yapacaklar için yönerge
P - Karadeniz Teknik Üniversitesi
Murat GÜCÜK
“Alevi Açılımı”nın Neresindeyiz? (SETA – 2014) (pdf)
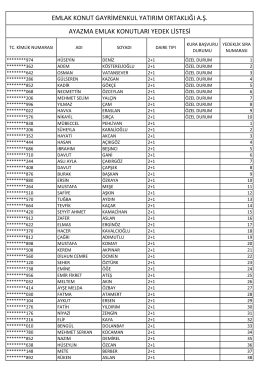
Ayazma Projesi Yedek Kura Listesi için tıklayınız