Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
TwinCAT 3.1 ile Seviye 4 Kinematik Dönüşüm
PC Tabanlı Kontrol: Gemi Yapımı İçin Evrensel Kontrol Çözümü
Dahili Akım ve Gerilim Ölçümüne Sahip IP 67 Güç Dağıtıcısı
KeDrive for Motion broşürü
Bağımlılıkla Mücadele Kursu (Tüm Okul Müd.) 16.03.2015 14:16
DÜZCE ÜNİVERSİTESİ CUMAYERİ MESLEK YÜKSEKOKULU
6.FUDBAL 21.03.2015 RSB.pdf - Top Bet Solutions
Genişletilmiş Master İşlevselliği ile CX8000 Gömülü PC Serisi
TwinCAT Bina Otomasyonu Yazılım Altyapısı ve Kilit Uzaktan
Matbaa ve kağıt makineleri için PC tabanlı Kontrol
Ambalaj endüstrisi için ölçeklenebilir ve yenilikçi çözüm
Pc Tabanlı Kontrol ve XTS İle Kaynak Tasarrufu Sağlayan Paketleme
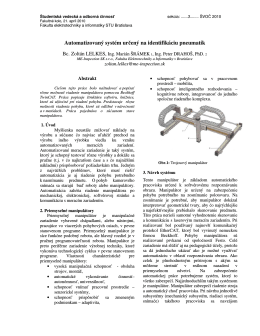
Automatizovaný systém určený na identifikáciu
Beckhoff Sürücü Teknolojisi: AM8000 Motor Serisi Daha Da Genişledi
kazımkarabekir kaymakamlığı voleybol turnuvası fikstürü
Danışmanlık Mutabakat Metni
Sem Operatör Panel
Virtuelna laboratorija za robotiku - ETF Robotics