Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
CV - Hacettepe Üniversitesi
Türkçe - GeoDestek Zemar Ltd.
TDV DIA - İslam Ansiklopedisi
PDF katalog için lütfen tıklayın.
ประกาิกณะกรรมการกอง"จูบสวิสอก`ารภาย่ํบมาิวิ ¸
HÍRLEVÉL az Országgyűlés által elfogadott 2012.01.01 - Itag
HÍRLEVÉL A gazdálkodókat érintő év végi fontosabb - Itag
MKT5001 Seminer Dersi Programı
RD4000 - ENERMAK
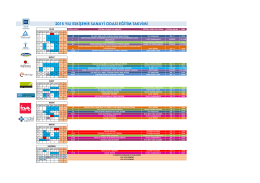
Faaliyet Planı / Takvimi
Sevgili Takipçilerimiz, Yorumlarınız, beğenileriniz, paylaşımlarınız ve
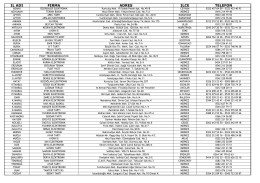
ıl adı fırma adres ılce telefon
Folder Drzwi Zewnętrznych DOORSY
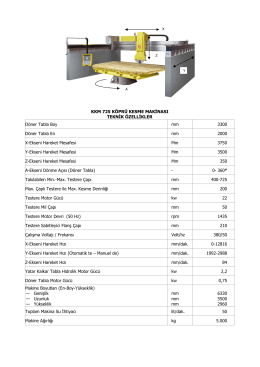
KKM 725 KÖPRÜ KESME MAKĐNASI TEKNĐK ÖZELLĐKLER
STM Savunma Teknolojileri Mühendislik ve Ticaret A.Ş. was
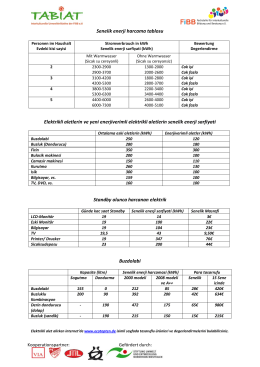
Senelik enerji harcama tablosu Elektrikli aletlerin ve yeni