Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
PowerPoint Sunusu - Selçuk Üniversitesi
Sayı 5 - Bilim Koleji
Sınav kaygısı Slayt
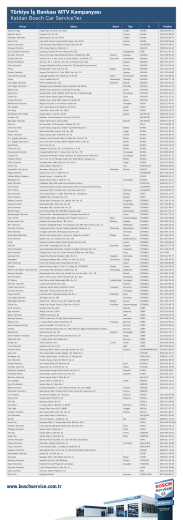
Türkiye İş Bankası MTV Kampanyası
93/C Yüreğir ADANA +90 322 324 04 14 2 Ayd
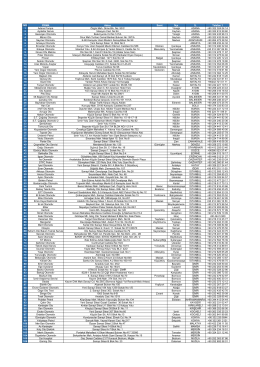
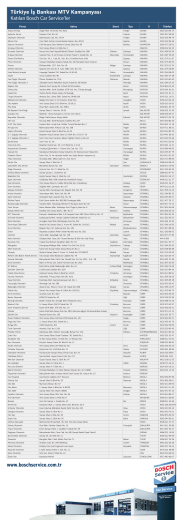
BCS-is Bankasi Kampanyasi
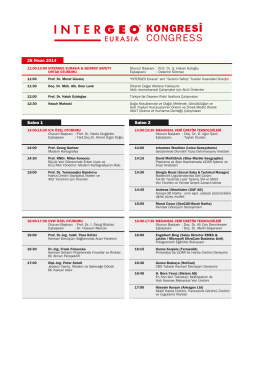
intergeo konferans A4 TR copy
fotoğraf neden çekilir
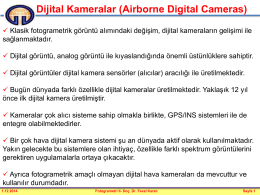
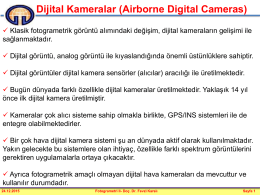
DMC
uluslararası vergi rekabeti ve vergi rekabetini önleyici düzenlemeler
Resim Yarışması - Samsun Çarşı Mağazası
doğrudan yabancı yatırımların yerli şirketler üzerine etkileri
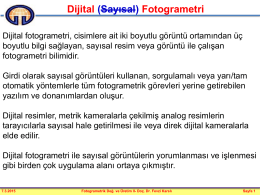
Dijital Fotogrametri
Yunus Emre Enstitüsü
Yapım Aşamaları
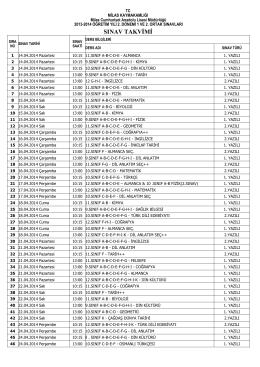
1 ve 2. Ortak Sınavlar (PDF Dosyası)
ulaşabilirsiniz. - VPA - Sabancı Üniversitesi
Fotogrametrik Üretim
DMC
4.1. Eksenel Basınç Tesirindeki Elemanlar
Kayseri Bünyan Elbaşı Köyü 26 pafta 6628 parsel Sit Alanı Dışındaki
BİRLEŞMİŞ MİLLETLER İŞ HAYATI VE İNSAN
Pobierz plik z artykułem