Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
H Tipi Yük úskelesi Sistemi
GÖKYÜZÜ – Sayı 50 – Şubat 2014
ünite 4 zaman içinde bilim
isAllowed=y;fontes byzantini historiam populorum jugoslaviae spectantes
Staj Duyurusu - tübitak ulusal gözlemevi
SLEDOVANIE POHYBUJÚCEJ SA LOPTIČKY MOBILNÝM ROBOTOM
Determination of elements in dust depositions by using ICP-OES
Informacja Miejskiej Komisji Wyborczej w Dęblinie z dnia 30.09.2014 r.
návod na inštaláciu a údržbu meničov frekvencie
TELESKOP - Prof. Dr. Ural Akbulut
Kisvasutak Csehországban
Gözlemevi Bülteni Yayınlandı
Povinnosti při uvádění výrobků na trh a kontrola jejich plnění
Fen ve Teknoloji 9 - İhtiyaç Yayıncılık
návod na inštaláciu a údržbu meničov frekvencie
Katalog - Dílenský nábytek
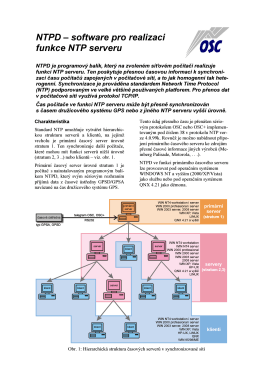
NTPD – software pro realizaci funkce NTP serveru
ustalara saygı - 1.Ulusal Radyasyondan Korunma Kongresi
Mesleki Akciğer Hastalıklarında Tanı
Optik Teleskoplar
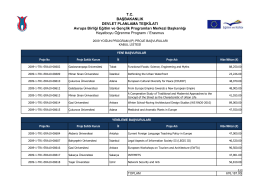
T.C. BAŞBAKANLIK DEVLET PLANLAMA TEŞKĐLATI Avrupa Birliği
sağlıkta yeni uygulamalar
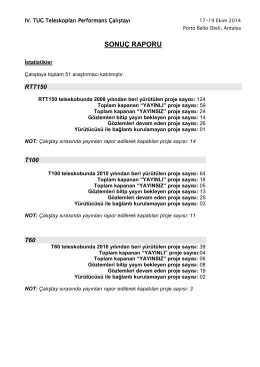
IV. TUG Teleskopları Performans Çalıştayı Sonuç Raporu (PDF)