Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
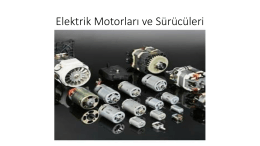
elektrik motorları ve sürücüleri 8 (İndirme : 0)
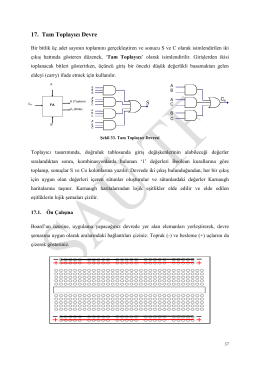
17. Tam Toplayıcı Devre
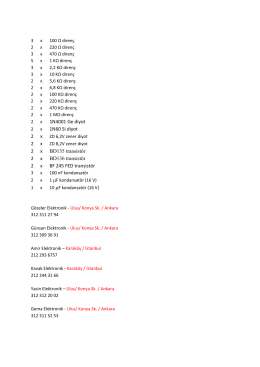
2 x 1N4001 Ge diyot 2 x 1N60 Si diyot 2 x BD135 transistör 2 x
ECE 492 SENIOR PROJECT I MINI SUMO ROBOT
bilgisayar destekli devre tasarımı dersi ısıs
PIC PROG/DEKA PRO-2 Eğitim Seti/Kartının Teknik Özellikleri Bir
Web Üzerinden Labview Kullanarak Altı Eksenli Robot Kolu Kontrolü
deney ta - Kimya Mühendisliği
to Download the Article(pdf).
Bölüm 10: Kaydırmalı kaydediciler (shift register)
20.09.2014 Tarihli Cephe Gazetesi
endüstriyel otomasyon teknolojileri mikrodenetleyici ile lcd
Genel Kurul Bilgilendirme
ŞİFRELİ KİLİT VE GÜVENLİK SİSTEMi
Çizgi İzleyen Robot Tasarımı
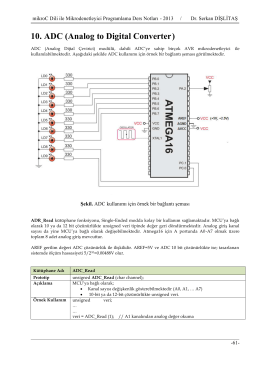
10. ADC (Analog to Digital Converter)
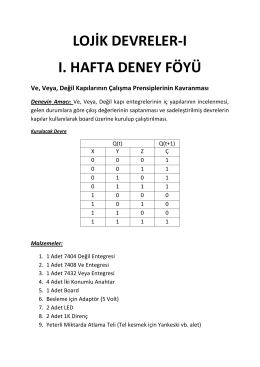
Lojik-I 1. Hafta
elektrik motorları ve sürücüleri 1 (İndirme : 0)
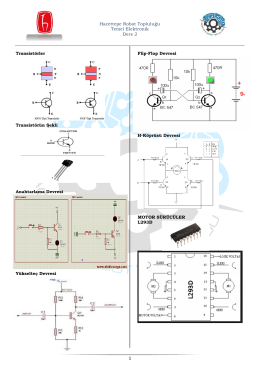
Hacettepe Robot Topluluğu Temel Elektronik Ders 2 Transistörler
Korisničko upustvo GP-550
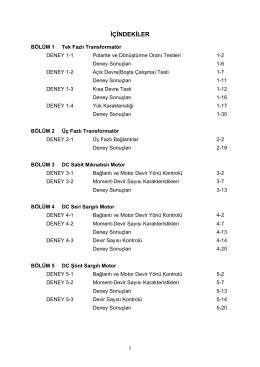
İÇİNDEKİLER
CNC KONTROLER 3SB
ESKİŞEHİR TURU (1 gece konaklamalı)