Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
YDA Gör¨unt¨uler ˙Için Gölgeleme Giderme Algoritmalarının
Esastan iptal kararı 2015/975 Aksaray için tıklayınız
BRİTANYA CUMHURBAŞKANI SEÇİMİ İLK TUR
EEG ¨Ozniteliklerindeki ˙Istek D¨uzeyi Bilgisi ile Görev Zorlu˘gu
ARIKAN, Nihat-TÜRK BİLİMİNDE KUASİSİMETRİ ÖRNEKLERİ
Fen Fakültesi Matematik Bölümü Lineer Cebir
özgeçmiş ve eserler listesi özgeçmiş - kbü-iibf fakültesi
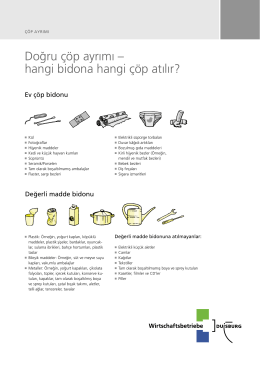
Do ˘gru çöp ayrımı – hangi bidona hangi çöp atılır?
VOSVOS SEVDASINA YAKALANDINIZ VE SAH]IP OLAB]ILMEK ]IÇ
C Programlama - Alper BAYRAK - Abant İzzet Baysal Üniversitesi
easyHDR 3 Instrukcja Użytkownika
BEHÇET UĞUR TÖREYİN - Çankaya Üniversitesi
Zoner Photo Studio 15
02. ARS Gripp - Türkiye Aile Hekimliği Dergisi
Wykład 3
2 - Beden Eğitimi ve Spor Yüksekokulu
ตารางวัน-เวลาให คําปรึกษา ภาคการศึกษาที่2/2556 3. คณะศิลปศาสตร
Poisson Denklemiyle İyileştirilmiş Fotomontaj
Date Topic Paper Presenter(s) 18/03/15 Nonlinear Filtering J
raspodjela bilateralnih transportnih dozvola za i kvartal 2013 godine


![VOSVOS SEVDASINA YAKALANDINIZ VE SAH]IP OLAB]ILMEK ]IÇ](http://s1.readgur.com/store/data/000530670_1-ac426e4dbd913169b506494fd0f947d3-260x520.png)