Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
x, y
ASDECS Kriterleri ile İş Stratejisi Geliştirmek
Dijital Hikaye Oluşturma Aşamaları 1. Aşama
Blowup in chemotaxis systems with nonlocal diffusion
İletişim nedir?
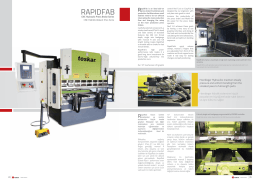
rapıdfab - Machine Solutions Inc.
Dijital Görüntü Đşleme Ödev Konuları
Segmentasyon ve CRM Uygulamaları
Dijital Görüntü Đşleme Ödev Konuları
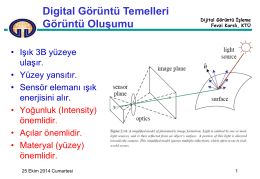
Sayısal Görüntü İşleme Ders içeriği..
Kliknite na sliku dabi ste skinuli katalog proizvoda.
Download (PDF, 94KB) - Mehmet Ali Çavuşlu
13-17 Ekim-2
Color image processing
Learn more
Görüntü Eşleştirme ve Teknikleri
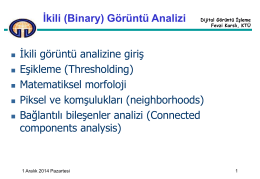
Dijital Görüntü İşleme
pléiades-1a görüntülerinin gerçek geometrik çözünürlüğünün ve
Başvuru Dilekçesi (1.Kura) - Manisa Kamu Hastaneleri Birliği Genel
2014-2015 Akademik Yılı Öğrenci El Kitabı
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
foto1.hafta1
Enerji Akışı