Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
amfibik bir askeri aracın sudaki stabilitesinin incelenmesi
BÖLÜM 5
16394-16399-15534-16368-15793
Tu si môžete stiahnuť január 2015
Balıkçı Gemilerinin Stabilitesi ve Stabilite Güvenlik
Bölüm 2
Bolum_2-C
İzmir İlinde 7-18 Yaş Arası Öğrencilerde Obezite ve Fazla Kilo
T.C. ANKARA 17. İCRA DAİRESİ T.C. İZMİ MAH BAŞ
Garanti Belgemiz - zirve ısı mühendislik
1.Ünite - Turaniler.com
2.Ünite
ANNE VE ÇOCUK SAĞLIĞI Doç.Dr. Ayşe
ghjklsizxcvbnmöçqwertyuiopgüasdfg
Assist. Prof. Dr. Ceyhun ARAZ
küçük erkekler badminton fikstürü
Yenilenebilir ve Yenilenemez Enerji Kaynakları
091205029
DİDİM İLçEsİ AİLE sAãLIêI MERKEZİ NÖBET LİsTEsİ
GARANTİ BELGESİ Üretici veya İthalatçı Firmanın: Unvanı: ZİRVE
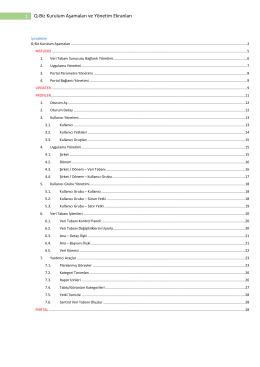
Q-Biz Kurulum Aşamaları ve Yönetim Ekranları