Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
F - ResearchGate
İŞYERİ EGZERSİZLERİ
KĠMYA – ÇEVRE LABORATUVARI NUMUNE KABUL ġARTLARI
KAS-İSKELET BİYOMEKANİĞİ - Celal Bayar Üniversitesi
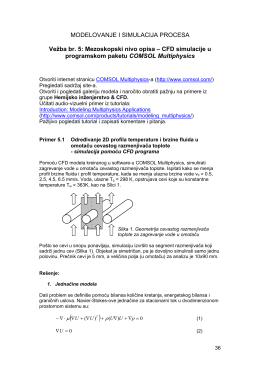
MODELOVANJE I SIMULACIJA PROCESA Vežba br. 5
Göster/Aç - İstanbul Bilim Üniversitesi
Yönetmeliğin Yayımlandığı Resmî Gazete`nin Tarihi Sayısı 12/9
Araştırma Raporu - III. Model Birleşmiş Milletler Türkiye
TOAK TOAK TOPLANTI TUTANAĞI FORMU Toplantı No
ÖZ GEÇMİŞ 1.1. Adı Soyadı: Mehmet Halidun Keleştemur 1.2
Étude d`impact sur l`environnement – Réseau Électrique
Privatnost, šta to beše
Ankara Üniversitesi Lisansüstü Eğitim
Praktické ukázky a zkušenosti s ANSYS 15
Alt Ekstremite Mekanik Aks Değişimleri Sonucu Oluşan Varus Ve
2014 ORTOPEDİ ve TRAVMATOLOJİ UZMANLIK EĞİTİMİ GELİŞİM
Türk Kulak Burun Boğaz ve Baş Boyun Cerrahisi
tendon yapışıklığını önlemede adezyon bariyerlerinin etkisi ve
Hakkında 12 Soru - Eesti Instituut
Bülten 2 - Medicine Hospital
İSG Rehberi Kitapçığı - Kayseri Milli Eğitim Müdürlüğü
ĠSTANBUL TEKNĠK ÜNĠVERSĠTESĠ UÇAK VE
Konstrüksiyon Malzemelerinin Özellikleri