Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Ders 3
Dökümanı buradan indirebilirsiniz.
Mesken Teklifi indirmek için burayı tıklayınız
kocaeli serbest muhasebeci mali müşavirler odası tesmer şubesi
chapter02_TR - Dr. Fehmi Bardak
Muayenehanelerde yapılabilecek işlemler hk
x - Trakya Üniversitesi
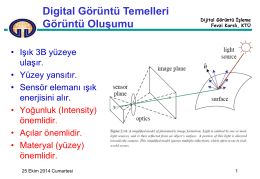
Dijital Görüntü İşleme
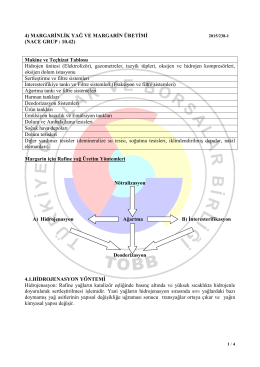
Margarinlik yağ ve margarin
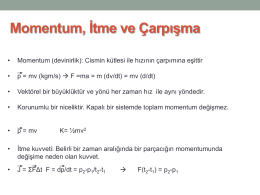
Momentum, İtme ve Çarpışma
anadolu yıldızlar ligi (ke) final yarışmalarına katılacak ferdi sporcular
Ders1-İstatistik Nedir
Boru ve Dirseklerde Enerji Kaybı Deneyi
2-Uçak İniş Takımı Tasarımı
STATİK (1. Hafta)
Ders Notu:Temel Kavramlar ve Sürekli Mukavemet Hesapları
img-320080900-2 - FATİH DEVLET HASTANESİ
1-Ekskavatör Kepçe Tasarımı
Ders 3 - IbrahimCayiroglu.Com
kadın koalisyonu yıllık toplantısı
18 EKİM 2015 TARİHLİ ETKİNLİK 1. Dört on binlik, 7 onluk, 3
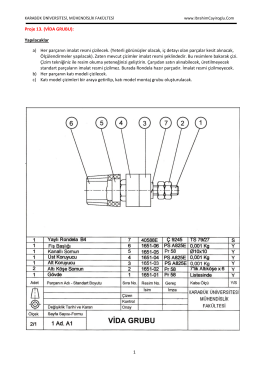
1 Proje 13. (VİDA GRUBU): Yapılacaklar a) Her parçanın imalat