Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
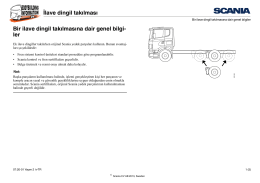
YÖNLENDİRİLEBİLİR İLAVE DİNGİL
Ders 3
İlave dingil takılması Bir ilave dingil takılmasına dair genel bilgi
SALAK İLE AVANAK GERİ DÖNÜYOR Yönetmen Bobby
Scanned Document - Burdur Kamu Hastaneleri Birliği Genel
hermetik bir kompresördeki yağ debisinin sayısal
Tüm Türkiye Motorlu Taşıyıcılar Kooperatifleri Merkez Birliği
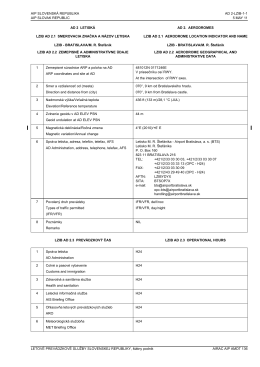
Verzia pre tlač Bratislava/M. R. Štefánik (PDF)
PRIJANJANJE I KLIZANJE - Teorija kretanja drumskih vozila
e-HM™Serisi Yatay çok kademeli santrifüj pompalar
PDF İndir - Yıldız Kalıp
07 nisan 2015 tarihli ihale listesi
Uzman Yanıtları
Bakım Onarım Anlaşmaları
Solunum Sıkıntısı Olan Hastaya İlk Yardım
TensCare – Genel Katalog (PDF)
Proje, Ağaç İşleri Teknik Resim ve Bilgisayar Destekli Tasarım
BĐR TARLA PÜLVERĐZATÖRÜNÜN BASINÇ VE DEBĐ
ıT^TTr - tarsus ilçe millî eğitim müdürlüğü
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania
Madencilik faaliyetleri ile bozulan arazinin doğaya yeniden
dizel motor ilk hareket destekleyicisi olarak faz değiştiren
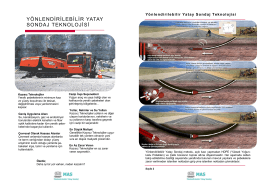
Yatay Sondaj PDF