Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
§-Kkn - Kayapınar İlçe Milli Eğitim Müdürlüğü
ORIGINALNI NAUČNI RAD PRIMENA GENETSKOG
Preview
Różniczkowanie numeryczne
Forex Akşam Bülteni
Mustafa Kutlu Hikâyelerinde İnsanî Bir Yitim Alanı Olarak Kent ve
27-30 mart 2015 iddaa oyun programı
Lisansüstü Çalışmalarda MATLAB
düzce üniversitesi 2015
PDF Dosyası - Altın Koza
Mariusz Truszkowski - konsultant ds. języka angielskiego
Uygulama Zamanı
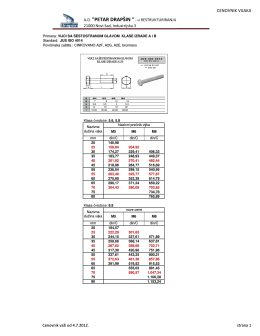
Cenovnik - petardrapsin.co.rs
3.9
Zadania
Cyclic conjugation in benzo-annelated triphenylenes
metody numeryczne - Jarosław Drapała
Yrd. Doç. Dr. Cihan Demir Mekanizma Tekniği 1
Planimetria
ก ก ก
ROBOT KĠNEMATĠĞĠ ÇALIġTAYI
pobierz