Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
27-30 mart 2015 iddaa oyun programı
Durağan ARIMA Modelleri: Otoregresiv Modeller
İSTATİSTİK UYGULAMA SORULARI (2013
§-Kkn - Kayapınar İlçe Milli Eğitim Müdürlüğü
ARMA Modelleri
Box-Jenkins
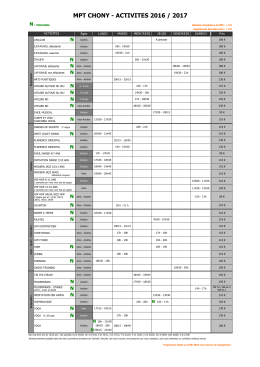
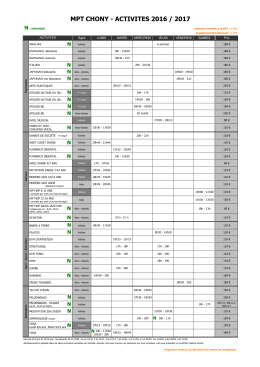
Horaire Tarifs
11. Kovaryans ve Korelasyon
Horaire Tarifs
doğrusal regresyon modeline matris yaklaşımı
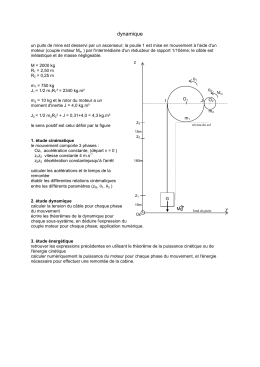
étude d`un ascenseur corrigé
Dengeleme Hesabı 1
Dengeleme Hesabı 1
yasama bölümü - Resmi Gazete
1 ENM 5210 İSTATİSTİK VE YAZILIMLA UYGULAMALARI Ders 4
çsbmyo büro yönetimi ve yönetici asistanlığı programı ö
RUUKKI_katalog_fasadni_stresni_profily
1 Zadanie 11.
ZASTĘPSTWA
mast Primena kod herpesa na usnama
PAZARTESİ SALI ÇARŞAMBA PERŞEMBE
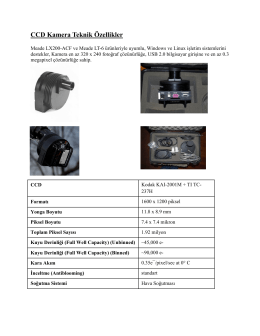
CCD Kamera Teknik Özellikler