Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Bir Binek Araç için Dört-Tekerlekten Yönlendirme
guc aktarma_gırıs_ıı_2014-2015
COSMAN FLEXTRODE
yakıt tuketımı – egzoz emısyonları ve testlerı_2014
SAĞLIK-Biy. Ekipmanlar 1511-SAĞLIK-2014-BE-01
tasıt teknlojısı_gırıs
Flux 2D SEA ile Doğrusal Eyleyici Analizi
bildiri - Ulusal Mühendislik Ölçmeleri Sempozyumu - 2014
kompleks cam işlemleri
Mevzuatın Kalitesi, Yürürlüğe Konması ve Uygulanması
Dikey Freze Kullanım Kılavuzu - Haas Automation® Resource Center
Polinomi po jednoj promenljivoj
Fluke 830 Lazerli Şaft Ayar Cihazı
DERS BİLGİLERİ
Projektör CP-DX250/CP-DX300 Kullanıcı Kılavuzu
karsanjest pdf
TÜRK HEPATO-PANKREATİKO-BİLİER CERRAHİ
İndir - BenQ
katalog - Master Service
makina fakültesi 70. yıl seminerleri 2014
YPETD_Hafta 7
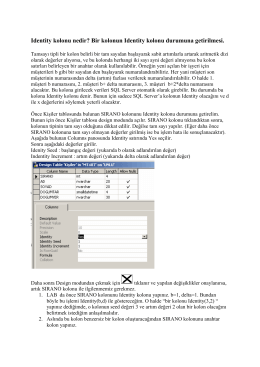
Identity kolonu nedir
lys mat ka yeni - Zafer Yayınları