Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
1 Implanter un programme dans le robot par connexion filaire (USB)
CNC vzpěra mechaboxu MBlock
diffuser des documents d`urbanisme sur le géoportail de l`urbanisme
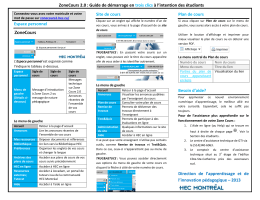
Guide de démarrage avec ZoneCours - Confluence
Informations de presse Télécharger
Vadémécum de mise en ligne de vidéos pour
Rédiger et proposer un article
A l`attention de Mesdames, Messieurs les
Guide d`utilisation de la plateforme ADDVIDEOFREE
La Malinette est un projet open source développé par Reso
guide d`utilisation de votre webmail
Appel de dossiers - Ville de Montréal