Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
draft - Kedrigern
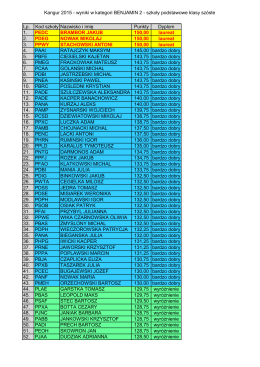
Beniamin 2
inf1_fz_2013
Stáhnout zde
null
Movité věci Vybavení kanceláře umístěné v sídle
ČETVRTI PROTOKOL
1 VŠEOBECNÉ ZMLUVNÉ PODMIENKY
Projektový zámer
– prohledávání grafů – DFS – Depth first search – BFS – Breadth
PDF, 233 Kb
PDF, 198 Kb
VŠEOBECNÉ POISTNÉ PODMIENKY I. ČASŤ
Názov vysokej školy, názov fakulty: Univerzita P. J. Šafárika v
PDF, 174 Kb
Krypto II - skripta-fmfi
??????? vyskúšali sme
PDF, 199 Kb
Poznámky k přednášce
FormulÁr o podmIenkach uzavretIa poIstnej zmluvy
Poznámky k cvičeniu č. 10
PDF, 181 Kb
ยุทธศาสตร์การดำเนินงานผู้สูงอายุ OK.docx