Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
ZOZNAM POUŽITÝCH SYMBOLOV
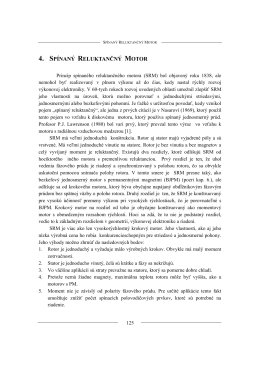
kapitola spinany reluktancny motor.pdf
Adobe ~ PDF
Diplomová práca
Modelové školy globálneho vzdelávania
Stiahnite si e-book 5 spôsobov prípravy kávy
Odporúčajú reťaze a veľkú ostražitosť
Komunikačná technika
Stiahnite si - Cafepoint.sk
Virtuálna hospitácia – Biológia: Osmotické javy v bunke
Krátky manuál na obsluhu moka kávovaru vo formáte
Ing. Oľga JOBEKOVÁ
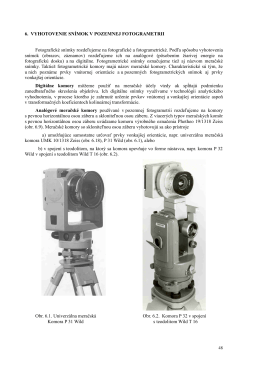
6. VYHOTOVENIE SNÍMOK V POZEMNEJ FOTOGRAMETRII
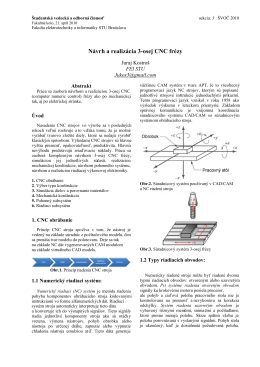
Návrh a realizácia 3-osej CNC frézy.
ST1112 - AMT měřicí technika, spol. s r.o.
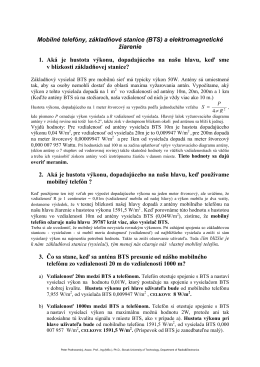
Mobilné telefóny, základňové stanice (BTS) a elektromagnetické
Pobierz (ok. 4MB) - SCADA HMI IntegraXor
využitie modernej prístrojovej techniky a metód spracovania pri
Michal Hudačin Absorpcia gama žiarenia a jej