Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Algoritmický prístup k modelovaniu umelých mravcov
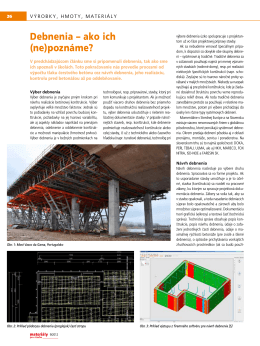
Debnenia – ako ich (ne)poznáme?
mezinárodní vědecký seminář nové trendy v ekonometrii a
null
1 + 1 = 3 -20% -20% -20%
1. roč. - Hlavná stránka ZŠ s MŠ Antona Matulu Sebechleby
Ukážka z knihy [PDF 623.4 kB]
Správy
klikni pre zobrazenie dokumentu o ochrane vinohradu
„Európa na svetovej scéne“
Vedci predpokladajú, že VČELA MEDONOSNÁ
3. Kolo - Korešpondenčný seminár z biológie
slidy v pdf
Podbrezovan 24/2012
Usmernenia - Esma
Title of the paper (14pt - YTEC 2015
PROJEKT_Stará_tržnica - Stará tržnica v Bratislave
sylabus prednášok - Katedra ekológie a environmentalistiky
Vybraté zachované územia v naturparku Veľký Milič - NAGY
03 2012 OKTÓBER ZADARMO
MRAVCE - STAVBA TELA
PLNÍME SNY
Opakovani C


![Ukážka z knihy [PDF 623.4 kB]](http://s2.readgur.com/store/data/000214744_1-a03fc3316ef509c60dff126391e272e9-260x520.png)