Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
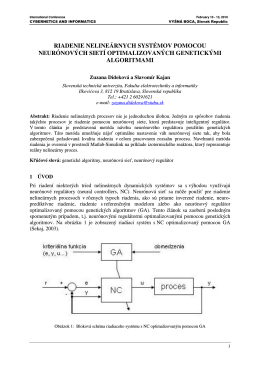
1. ÚVOD
Routing Information Protocol
CZ - Strategie vzdělávání 2020
PowerPoint Sunusu - Endüstri Mühendisliği
Müdürlüğümüzün konu ile ilgili 24/10/2014 tarih ve 4806560 sayılı
Tętniaki tętnicy śledzionowej - objawy, diagnostyka i
riu olod norr` bb n
Mesiánske proroctvá o transformácii ľudskej spoločnosti (Messianic
Klasyfikacja generalna – „Zjazd”
Trucks - OrlenOil.pl - Oleje samochodowe, olej silnikowy syntetyczny
tutaj. - Orion Investment SA Developer Kraków
Volitelné předměty 2015-2016 - České vysoké učení technické v Praze
Národné športové predpisy pre PAV (platné od 1.1.2015)
plan III rok
riadenie nelineárnych systémov pomocou neurónových sietí
Colonel (GS.Ret.) Prof. Dipl. Eng. Pavel NEČAS, PhD
pro školní rok 2014 / 2015
Pdf - 214.71 Ko - Le portail de la modernisation de l`action publique
Poznámky k cvičeniu č. 10
funkční vzorek experimentální zařízení pro využití alterna
Riadenie robota rozpoznávaním ľudských pohybov pomocou
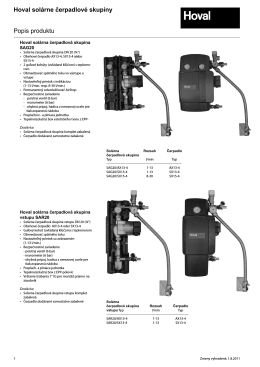
Solarne cerpadlove skupiny katalog
historie proudových motorů