Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
CAE mechatronických systémov Prednáška č. 1 Úvod
20_Číslicové riadenie
Przyrządy półprzewodnikowe mocy Mechatronika, studia
5th IEEE Conference on Cognitive Infocommunications
null
PaV – P&ID
Bakalárske práce
Six-Sigma
Náročné inženýrské problémy a superpočítání
Organizers - CogInfoCom
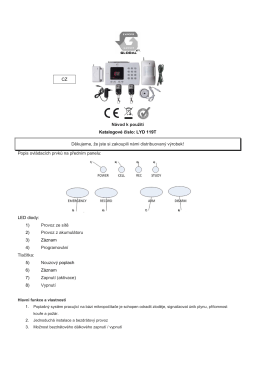
LYD 119T Děkujeme, že jste si zakoupili námi distribuovaný výrobek!
Životopis - Centrum moderných metód riadenia a priemyselnej
autopilot v úlohe záchranného systému pri strate signálu rc modelu
Riešené príklady
Chronic moderate alcohol consumption induces iNOS
zastosowanie rozmytego sterowania adaptacyjnego w układzie
MCLS-modular®
PŘEPÍNÁNÍ A SMĚROVÁNÍ OPTICKÝCH
„Lidské bytosti mají bezpodmínečné právo na život bez ohledu na to
Stradiot - Kupec - Rehák
4th IEEE Conference on Cognitive Infocommunications
Univerzální vstupně/výstupní modul k PC připojitelný přes USB
Spolupráca s praxou - Strojnícka fakulta