Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
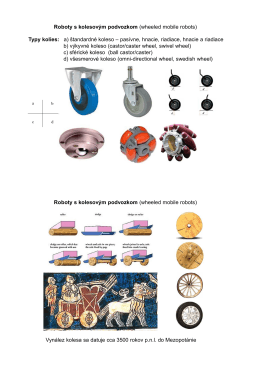
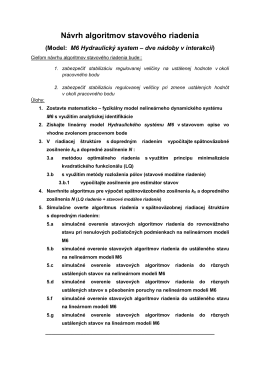
Identifikace a návrh °ízení pro model kuli£ka na plo²e
Bulletin v pdf - Česká statistická společnost
Príloha J, článok 256
Výjav na úhor- l/škom sneme. Svetová vojna,
Osemdesiatročný JURAJ TÖLGYESSY
Zápisnica z VS SVB ZVB 502 zo dňa 29 05 2013 pre
PATCHWORK PARTY
Stimulacny program.pdf
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
Forex Akşam Bülteni
TEORIE SYSTÉMŮ - Personalizace výuky prostřednictvím e
P - Avir
Vypracované otázky na skúšku z Neurónových sietí
Riešenie
NÁVOD P5310, P5311
Katalóg samochodných postrekovačov John Deere (pdf 3
TV Studio Region Nízká cena, snadný provoz, optimální výkon
Návrh algoritmov stavového riadenia
Model žeriavu (3Dcrane) v prostredí MATLAB Simulink s využitím
metody numeryczne - Jarosław Drapała
Kontrola predkości obrotowej
LABORATORIUM: Sterowanie rzeczywistym serwomechanizmem z
CENNIK 2015 SHEAFFER 22 01 2015