Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Stáhnout práci v PDF
Národná banka Slovenska: Výskumný asistent
PI Denetleyici İle Sıvı Seviye Kontrolünün Gerçek Zamanlı Olarak
ARROW WL 65 WOODLAKE - Svářečky
Product Summary for Remark Office OMR®
Fourierova transformácia a jej použitie
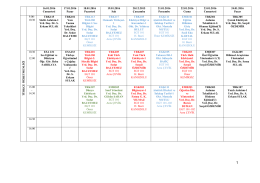
Hrací řád LODM
Právny štát
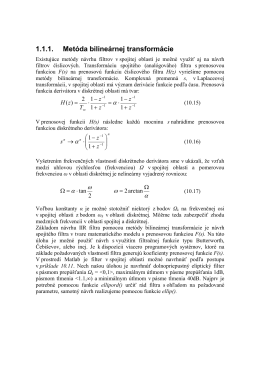
1.1.1. Metóda bilineárnej transformácie
Popis modelu
Document
Euro Dallas 65, EN - Zahradní domky.cz
16.01.2016 Cumartesi 17.01.2016 Pazar 18.01.2016 Pazartesi
Suppression of Motion Artifacts in Optical Action Potential Records
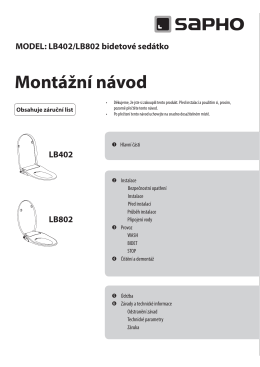
Montážní návod
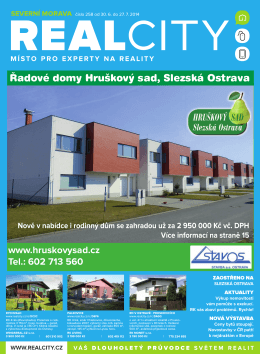
đadové domy Hruškový sad, Slezská Ostrava
Kültür, benlik saygısı ve girişimcilik eğilimi
program - Szkoła Muzyczna I st. w Zgierzu
Najvyšší súd Slovenskej republiky 6 Cdo 182
raporcie - Grant Thornton
Informačná brožúra školení pre rok 2015
P-58 VENÖZ PORT YERLEŞTİRİLMESİNDE YENİ TEKNİK: TEK
Software602 Print2PDF X - Installation Guide (PDF)