Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
SPOJITÉ LINEÁRNE RIADENIE – vlastnosti regulačných členov
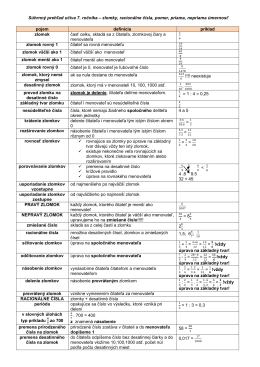
Súhrnný prehľad učiva 7. ročníka – zlomky, racionálne čísla, pomer
6_Popis stat. a dyn. RS
Cisco_Meraki_EU Privacy and Data Protection Compliance_SK
Doučovanie z matematiky - Prijímacie skúšky na vysokú školu - T-com
Strategické hodnotenie manažérov prostredníctvom
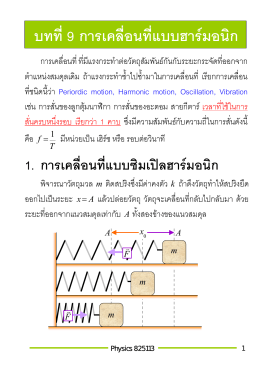
A t - ฟิสิกส์ราชมงคล
Automatizace procesů05.06. 2016
POSUDOK OPONENTA BAKALÁRSKEJ PRÁCE Autor práce: Klára
22_Číslicové riadenie
4_Popis stat. a dyn. RS
Teória, príklady
SW-3501A Small dolphin Model Number : SW
vzor
Úlohy a príklady
7_Popis stat. a dyn. RS
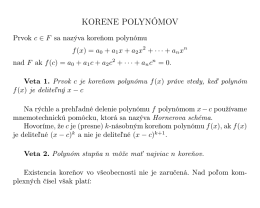
3. Korene
Teória - Mechanika hmotného bodu
Učebnica je určená študentom, ktorí majú záujem študovať na
Fyzika AI LS 2013/2014 – 4. týždeň 1. V strede kolotoča v
Trojfázová soustava I - elektrotechnika.chytra.cz
Vonkajšie vplyvy
Meranie dĺžky telesa