Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Piezoelektrické motory
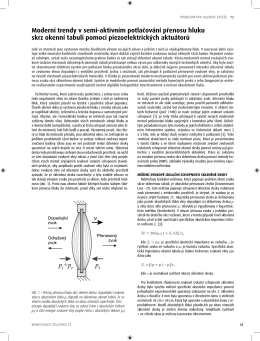
simulácia riadenia indkučného ohrevu ako systému s
ČO SÚ BIOCHEMICKÉ SOLI? TVÁROVÁ DIAGNOSTIKA - Mandala-Art
Elektronické zapaľovacie systémy.pdf
Zadanie témy bakalárskej práce
Spektrum 4/2014 (pdf., 3,3 MB)
ROZŠÍRENÝ SÚBOR TKANIVOVÝCH SOLÍ (Č. 13 AŽ 27) Reguluje
Elektrostatické pole
Zde - Časopis SILNICE ŽELEZNICE
Žilinská univerzita Diplomová práca KAVS 4 1 Úvod
Výroční zpráva a hodnocení za školní rok 2013-2014
E TRA - Strojárstvo
RNDr. Pavol Hvizdoš, CSc.
Vyhlásenie k životnému prostrediu Správa životné prostredie a
VITRALAB
Bezpečnosť a ochrana zdravia pri práci
33_Snímače tlaku(3)
Úspech firmy závisi od toho, ako sa plnia stanovené
Vysoké učení technické v Brně
Bazální stimulace
Nároky ovocných druhů. Druhová rajonizace.
Nové prístupy k riadeniu ľudských zdrojov vo firme New approaches
inf2_fz_201