Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Jednosmerný a jednofázový elektromotor
3. Ako nahrávať zvuky
PR1 Jednosmerné motory
Magnetické pole
Audit mazania
PR2 BLDC motory a SMPM
M-CK4-SKFB 1
návod na tepelne čerpadlo hydro pro+ - Bazen
Pohyb si vyžaduje Presnosť
03-Elektromotor na trojfazovy prud
TECHNICKÁ UNIVERZITA V KOŠICIACH
Popis jednotlivých fondov
Generátory.pdf
Návod k použitiu skúšačky DUSPOL® expert
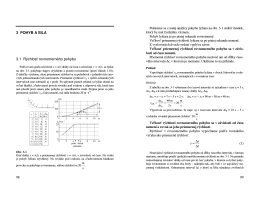
3 POHYB A SILA 3.1 Rýchlosť rovnomerného pohybu
Odrušenie motorových vozidiel Každé elektrické zariadenie je
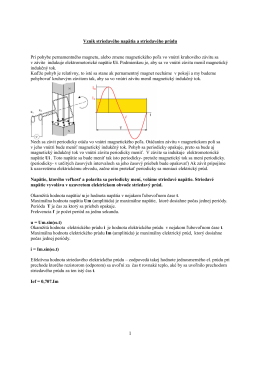
Vznik striedavého napätia a striedavého prúdu Pri pohybe
Okruhy E4A maturita pro studenty 2014.pdf
Vodná elektráreň Nové Mesto nad Váhom
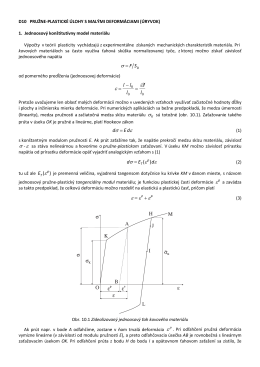
D10. Základné pojmy Jednoosový konštitutívny model materiálu
Riadenie automobilu
9_Regulátory(1)
Realizácia plynových prípojok