Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
gömülü grafik işlemcileri için opencl tabanlı görüntü işleme
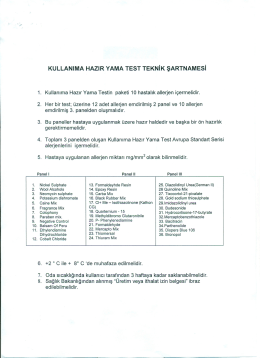
Teknik Şartname
Przemysł wykorzystuje wodę na wiele różnych sposobów
Photometer 7500 - Global Concepts
Mayis 2014
Digitalizacija rendgenske slike
İLERİ GÖRÜNTÜ İŞLEME Ders-1
fpga tabanlı sayısal sinyal işleme algoritmalarına özelleştirilmiş
2-Mikroişlemci mimarisi
İtalik - İstanbul Ticaret Üniversitesi
İndir
Microsoft Excel - Umit D. Ulusar
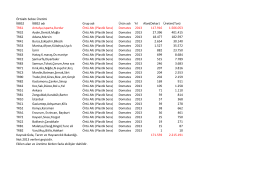
GÜNCEL HAKEM 06.11.2014 - Türkiye Bilardo Federasyonu
butik karadeniz turu
1. Su Tasarruf Teçhizatı
Salçalık - DomatExpo
AIDA64 Extreme
escide 48l - Global Concepts
2014-2015 Bahar BİL 691/692/791/792 Seminer Dersleri
ULTURA elektro kaplama broşürü
plastik sera
İMGE İŞLEME Ders-2
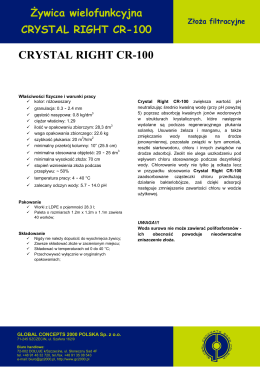
CRYSTAL RIGHT CR-100