Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Diplomová práca
KATALOG NARZĘDZI - Ol-Ju
NÁVOD - CPA CZECH sro
ZOZNAM POUŽITÝCH SYMBOLOV
MFL68680227
เซนเซอร์ชนิดเปลียนแปลงค่าความจุไฟฟ้าราคาถู
Wprowadzenie do teorii fal radiowych i łączności radiowej
06-11-14 - HSBC Portföy Yönetimi
01076203 digital circuit laboratory
Organizacja ruchu rowerowego w Danii
20_Číslicové riadenie
prezenční
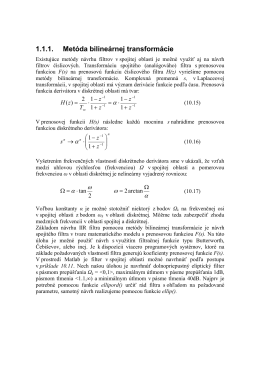
1.1.1. Metóda bilineárnej transformácie
EE ,, ŽŽ ŽŽ - moja Bystrica
rýchlo - lacno - kvalitne
Vážky (OdOnata) Malej VOdárenskej nádrže a
AKDEMİR | İndir - yildizsahin.com.tr
celková práca - Žilinská univerzita
Wyznaczanie prędkości rozchodzenia się dźwięku
Výzva na predkladanie ponúk v podprahovej zákazke
(Edukačný list
pdf, 101 kB - Primetrology
Generatory meracich signalov 2014.pdf