Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
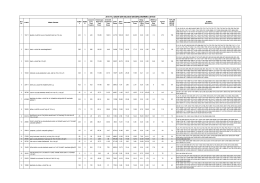
Soru örnekleri ve çözüm veya cevapları
VİOP Günlük Bülten 19 Ağustos 2016 Cuma
VİOP Bülten - Şeker Yatırım
VİOP Bülten - Şeker Yatırım
การวิเคราะห์ระบบควบคุมป้อนกลับด้วย Matlab/Simulink
E-Broşür - Hyundai
Ćwiczenie 1
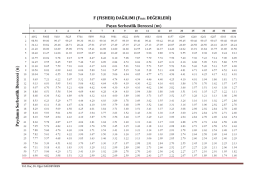
F (FISHER) DAĞILIMI (F0.01 DEĞERLERİ) Payın Serbestlik
Etoloji(Davranış Bilimi) :Doğal koşullarda hayvan davranışını
8. Sınıf Fen Bilimleri Kazanım Kavrama Testi 9
E-Broşür - Hyundai
Editörden - Mardin Artuklu Üniversitesi
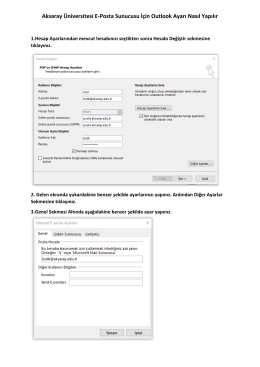
Outlook ayar dökümanını görmek için tıklayınız
Lisans ders içerikleri - izmir yüksek teknoloji enstitüsü elektrik
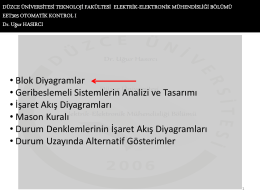
ELE301 -Kontrol Sistemleri I
PREŠOVSKÁ UNIVERZITA - Fakulta humanitných a prírodných vied
güneş enerjili aydınlatma
ELE301 -Kontrol Sistemleri I
2015 yılı ubak izin belgesi değerlendirme listesi
s - Düzce Üniversitesi
Arş.Gör.Hasan Sözen - Elektrik-Elektronik Mühendisliği Bölümü
DVERE ECONOMY
JABRA PRO 925