Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
VYSOKE´UCˇENÍTECHNICKE´V BRNEˇ
Kurs programı için lütfen tıklayınız.
Prosesler Arası İletişim
ÁSZF - Getgroup
Grafické karty strednej triedy
adjust ABD ve Asya Piyasalarında Hızlı Büyümek için ACTIVE
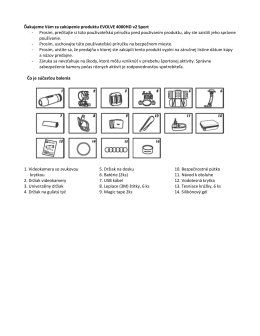
Ďakujeme Vám za zakúpenie produktu EVOLVE 4000HD
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
Katalog Usługi CnC - Milling
C H E S S - TOPCD.cz
obsah - TOPCD.cz
RUSKOVAE HUTORIA pvaugust.pdf
Špecifikácia ATMO
ŽILINSKÁ UNIVERZITA V ŽILINE DIPLOMOVÁ PRÁCA
download (save as / farklı kaydet)
Uživatelská příručka pro produkt Synology NAS Vychází ze systému
KÜTÜPHANEYE YENİ GELEN YAYINLAR (01-30 Nisan
témata bakalářských prací
Harmony - Mikado TA
BLGM 343 – DENEY 6 * Amaçlar Ön Bilgi
Informacje i regulamin
Cisco ASA 5500 Content Security datovy list
spracovanie