Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
inteligentná dynamická nápravová váha - KME
diplomová práca - KME
Záhradníctvo ZÁHRADA
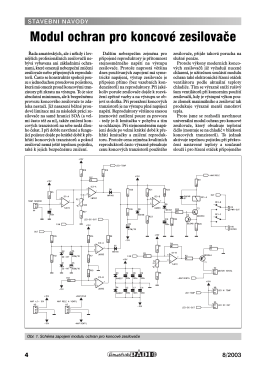
Modul ochran pro koncové zesilovače
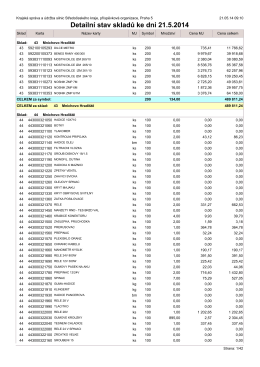
Detailní stav skladů ke dni 21.5.2014
Preuzmite uputstvo za upotrebu
Katalog strojů Bomag
VŠEOBECNE záväzné nariadenie obce Široké č
Stanovisko OZ Malé Karpaty k EIA D4
ARCH: Lanová dráha Priehyba - Chopok (2013) /PDF
Dokumenty na stiahnutie
Volebný poriadok Slovenského zväzu chovateľov
Fíovo čtení
Generátory.pdf
Albrechtov dom Knižnica Prepoštský palác Múzeum Vinárstva
Typy kontajnerov
Zápisnica z 34. zasadnutia obecného zastupiteľstva
Rozhovor s Veronikou Zuzulovou (najlepšia zjazdová
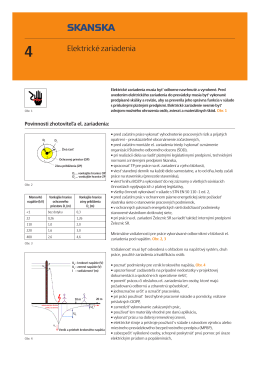
Elektrické zariadenia
Návod pro Detektor D-TEK
EU SILC
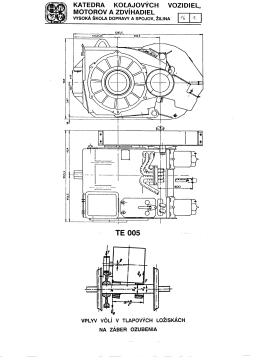
Pohony dvojkolesí TM - Strojnícka fakulta
191 1 ÚVOD 2 KONTAKT KOLESA S VOZOVKOU