Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
ŽILINSKÁ UNIVERZITA V ŽILINE
Splňte očakávania vašich zákazníkov so
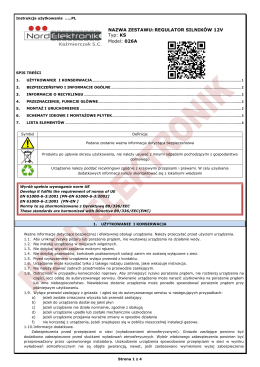
Wykład 1 Gospodarka wodna roślin Niezwykłe właściwości wody
Komornik Sądowy przy Sądzie Rejonowym w Legionowie Leszek
1 Aplikačné oblasti mikroelektronických senzorov 1
Výkonové elektronické systémy
Kataloga erişmek için tıklayınız
Žilinská univerzita v Žiline INTELIGENTNÝ ZDROJ PRE
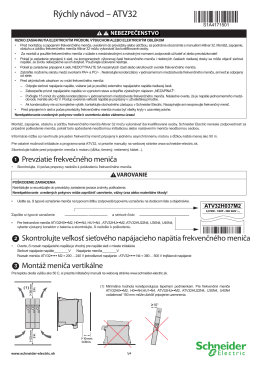
Rýchly návod – ATV32
návrh napájacieho meniča s využitím súčiastok pc zdroja typu at
PiloTREK - nivelco
Vysoko presné rezanie laserom
Prvý ročník, číslo 3 - 4/2010
MERCEDES- BENZ C
Tretí ročník, číslo 1/2012
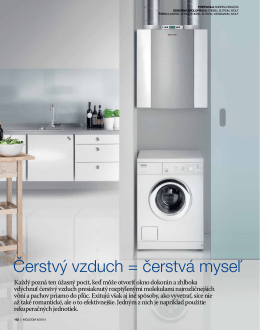
Čerstvý vzduch = čerstvá myseľ
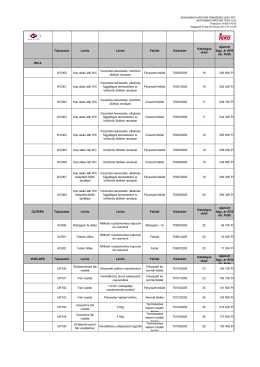
val, Ft/db WC-k WC000 Kúp alakú
Zalecenia do nadwyżki
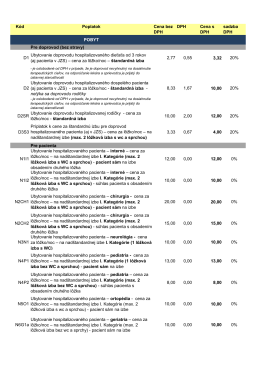
Kód Poplatok Cena bez DPH DPH Cena s DPH
PMS-PLi-katalog r01.cdr
Univerzální vstupně/výstupní modul k PC připojitelný přes USB
LABORATÓRNE PRÁCE - Katedra elektrotechniky a mechatroniky
Všeobecné podmienky služby tv2go