Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Multimédiá
Zoner Photo Studio 15
televízna a komunikačná technika – teoretická časť
ele_tis_3r.pdf
Modulárne riadenia CECX
31 DZR Digitální zpracování signálu řeči
Václav Syrový / HUDEBNÍ ZVUK
DVA_06_2015
Návrh a konštrukcia lekárskych prístrojov
Jún 2012 - Strojárstvo
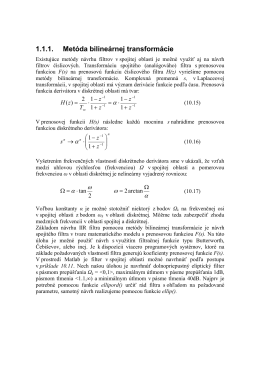
1.1.1. Metóda bilineárnej transformácie
Názov vysokej školy, názov fakulty: Univerzita P. J. Šafárika v
Telefónne prístroje
Systém centralizovanej ochrany Modul „KM“
Nosné tématické okruhy
vyhláška Ministerstva kultúry SR č. 468/2013 Z. z.
27_Prevodníky AD, DA(2)
Obmedzená záruka spoločnosti TOSHIBA
Analógovo-číslicový prevod I.
Prenosové systémy FDM a TDM
Východisková analýza Koncepčný návrh systému vzdelávania
Frekvenčné meniče, ich využitie na pohony
Otázky z predmetu PSS