Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
WAVELET TEORİSİ
B3 - A. Alper Cerit, PhD
İngilizce İktisat Lisans Programı
görüntülerin renk uzayı yardımıyla ayrıştırılması segmentatıon of
Text Categorization-11
Wavelet Transform and Applications
Kartlı Ödemelerin Ekonomik Faydaları
Spisok na ovlasteni menuva~i so dozvola za rabota
Calculer la somme cos cos2 cos3 cos 1 cos cos cos cosn x x x nx S
Söyleşinin devamı
AYLIK SEKTÖR RAPORU AĞUSTOS 2015
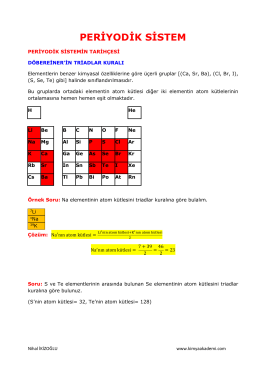
PERİYODİK SİSTEM
2015-2019 Aşık Veysel Güzel Sanatlar Lisesi Stratejik Planı
Muhasebe Kârları İle Hisse Senedi Fiyatları Arasındaki İlişki: BİST
Międzynarodowy Zbiór Metod z Zakresu Doradztwa Zawodowego w
4. SU 4.1 GİRİŞ Betonla ilgili işlemlerde, suyun değişik kullanım
Curve Fitting with NURBS using Simulated Annealing
Time Series Analysis: 12. Stochastic Differential Equations