Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Popis a ovládání systému DMC pro automatické řízení pohybu 1
Záměr pronájmu objektu "Špejchar"
Technické vybavení počítačů
Možnosti protokolu Cisco VTP verze 3, rozdíly od předchozích verzí
Studi pada Perusahaan Sektor Industri Barang Konsu
Experimental Design and Statistics - AGA46E
Export PDF - Know Sharing
Mikroprocesory AVR Tiny - Střední průmyslová škola Trutnov
Vlastní diagnostika 4.pdf
Provozování DNS - Ondřej Caletka
Danfoss VLT Drives Přehled výrobků
SIRONA - TOSIA.pl
Nastavenie tlače
3 - Jamall
บทที่ 19 ติดตั้ง อัพ เกรด และใช้งาน MySQL MySQL (มายเอสค
Designový ASUS WiFI
Naprawa_wymiana sterownika z mechanicznego na elektroniczny w
Hodnocen[PleaseinsertPrerenderUnicode{Ă
Použití fiskální tiskárny EFox firmy ELCOM s programem
Řada monitorovacích relé K8 od Omronu
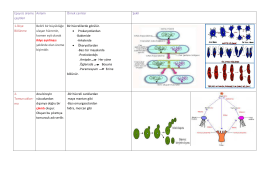
Eşeysiz üreme çeşitleri Anlamı Örnek canlılar Şekil 1-İkiye
Mut International s.r.o.
Nastaveni noveho systemu Mikrotik