Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Da Vinci sakrokolpopexe v chirurgii urogenitálního
schůze purkynka
Seznam výkonů, ke kterým NCB požaduje informovaný souhlas
promocja zdrowia a zaburzenia statyki narządów płciowych
Celý článek - Česká Urologie
prezentace
Endometrioza w bliźnie po CC - nowoczesna diagnostyka i terapia
Termické lézie v laparoskopickej chirurgii
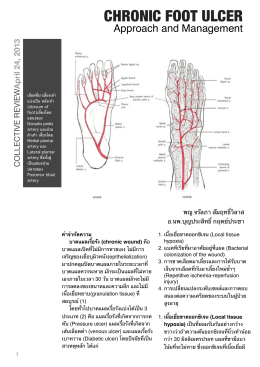
Chronic foot ulcer
Stáhnout soubor - Česká urologie
Psychologická metodologie - Pražská vysoká škola
PROGRAMOVÝ SBORNÍK
Leczenie operacyjne prolapsu - State of the Art 2015 - E
Červen 2016 - Fakultní nemocnice Plzeň
TÉMY DOKTORANDSKÉHO ŠTÚDIA EXTERNEJ VZDELÁVACEJ
Laparoskopické operácie na pankrease – vlastné
Nietrzymanie moczu – diagnostyka kliniczna
Pediatrik Robotik Üroloji
Seznam autorů a obsah
POZVÁNKA V. sympozium NELZP Operačních sálů a Centrální
2-2013 - Laparoskopia & Endoskopia
1. Která kapalina se více odlišuje od ideální kapaliny, voda nebo olej?
Brochure Les Ailleurs 2016 (pdf - 1,32 Mo) - Charleville