Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
elektricke stroje.pdf
Kosmo
Komutátorové stroje 1
PPPP RRRR OOOO VVVV OOOO ZZZZ NNNN ÍÍÍÍ
INZM _semestralni_prace_2.pdf
Přednáška č.5
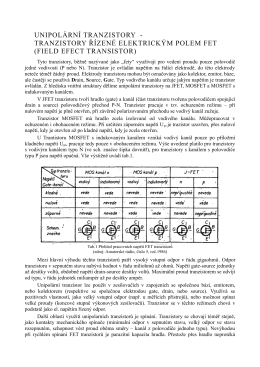
FET.pdf - Webnode
Maskování zvířat v přírodě
SPAU 140 C - VF servis
strana 3 - Noviny Region
Auto – moto Byty – nemovitosti Pronájmy Prodej
Synchronní stroje
pdf, 635 kB - VOŠ a SPŠ elektrotechnická Františka Křižíka
Automatizace procesů05.06. 2016
Učební text
1. zebranie prezydium zarządu głównego sep 2. w oddziałach sep
Akademia Humanistyczno
Mechanik elektrotechnik
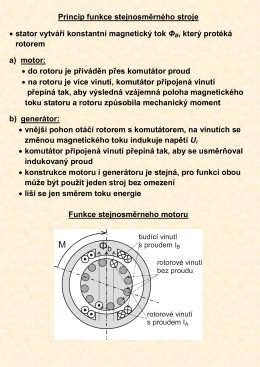
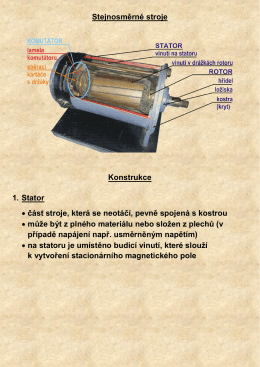
Princip funkce stejnosměrného stroje • stator vytváří konstantní
Stejnosměrné stroje Konstrukce 1. Stator • část stroje, která se
Projekt OV3000
ROCKFON SYSTÉM T24 X
Řízení jalového výkonu synchronního generátoru