Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Turbulence
Turbulence
ŘÍŠE HVĚZD - SUPRA Praha
forum 2_14.pdf - Spolok architektov Slovenska
Pyramida HVĚZDA ŽIVOTA
Výroční zpráva o činnosti Fakulty informatiky a statistiky VŠE v Praze
t - Jabbim
SZZ - Zpracování a rozpoznávání obrazu.pdf
Müdürlüğümüzün konu ile ilgili başvuru ilanı
t - Přírodovědecká fakulta
zde - Oddělení povrchového inženýrství
Gyromagnetická částice, jev magnetické rezonance
hydrodynamika a hydrodynamické stroje
Příručka Hasič v roli zdravotníka
Podivnosti v gymnaziální fyzice
Vzorové příklady
Wstęp do mechaniki kwantowej - Zakład Teorii Cząstek
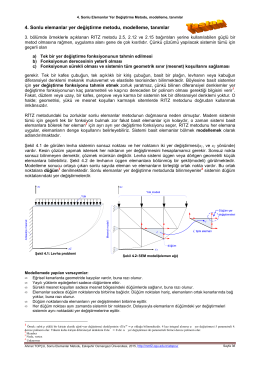
4. Sonlu elemanlar yer değiştirme metodu, modelleme, tanımlar
zde
NAPLASTI - Dr. Max Lékárna
Determinační faktory vzduchotěsnosti energeticky efektivních budov