Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Základy 3D grafiky
Operat szacunkowy - wyciąg KZ1A/00055160/7 opisu i oszacowania
Grafika czasu rzeczywistego
PDF prezentace HoHo
Studijní text [pdf] - Personalizace výuky prostřednictvím e
Lab-Week-1
IZG cvicení 6. - Zobrazování 3D scény a základy OpenGL
ZÁKLADY ETOLOGIE ČLOVĚKA A PRIMÁTŮ
Zdravie ženy a dieťaťa z pohľadu Personalizovanej zdravotnej
09 - 3dapi.com
Programowanie OpenGL
1. Vyhledávání v textu
chapter1
Pürüzlü Yüzey Üretimi - Karadeniz Teknik Üniversitesi
letöltés PDF
ćwiczenie 3z
คอมพิวเตอร์กราฟิกส์ใช้ OpenGL
Krivky v priestore E
Popis rodinného domu
Twist French - nailpropoland.com
typ EMAX Návod k instalaci - ELGO
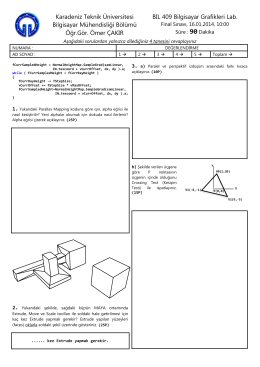
2013-2014 Güz Dönemi Final Soruları
Ders1 - Giriş
![Studijní text [pdf] - Personalizace výuky prostřednictvím e](http://s2.readgur.com/store/data/000164552_1-d4316080ac88da6d0ebe7822963943fb-260x520.png)