Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Základy kartografie a cyklografie
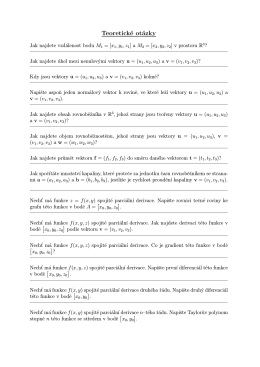
TOPOGRAFICKÉ PLOCHY Dalš´ı krivky na topografické ploše
moje zcela neukázkové řešení
Sylabus prednášky MAF051 (Matematická analýza I) 1. ´Uvod (neco
Topografické plochy
1 Sférická trigonometrie
otevřít
Zborcené plochy
8. týden
Kapitola 10 Pouˇzitı derivacı (optimalizaˇcnı ´ulohy)
Sbírka řešených a neřešených příkladů z vybraný..
Příklad 1
zde
Kako je Mila dobila krila
3. 3D integrál
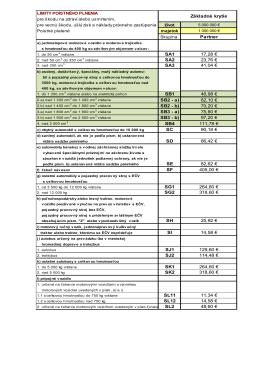
Tabuľka