Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Výukový materiál 2 - MediaWiki SPŠ a VOŠ Písek
TZ 22. 8. 2016_Veletrh FOR ARCH představí komfortní a
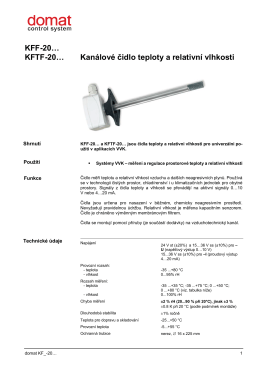
KFF-20… KFTF-20… Kanálové čidlo teploty a relativní vlhkosti
Prospekt systému EVOHOME
1-2/2012 - Hydropneutech sro
Zdroje tepla Přednáška 5. - Strojnícka fakulta
Kompakt işletme kılavuzu MOVITRAC® B - SEW
D.1.4.a.01-Tech. zpráva
MĚSTSKÝ ÚŘAD LANŠKROUN
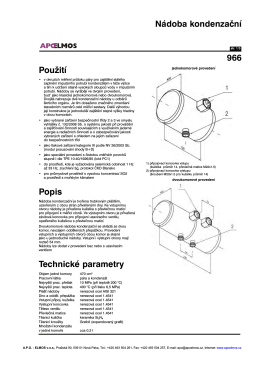
Použití Popis Technické parametry Nádoba kondenzační 966
Práce
Návod k obsluze - SIGMA 1868 spol. s ro
STROJÁRSTVO - ENERGETIKA, ELEKTRONIKA
odkaz
Raport Roczny 2012
PRESSURE AND VACUUM PŘETLAK A PODTLAK
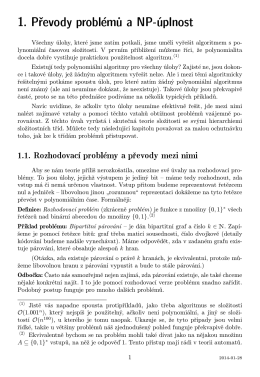
Převody problémů a NP
Přímočinné regulátory diferenčního tlaku a přímočinné
KATALOG OHŘÍVAČŮ VČ.CEN (ke stažení)
druhou část - Technický týdeník
Nabídka rekvalifikace - Institut celoživotního vzdělávání, Havířov
EASTER BUNNY HUNT
paweł andrzej łapiński