Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
t - Jabbim
polotovar
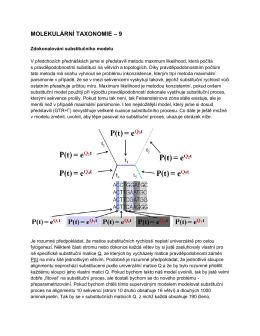
MOLEKULÁRNÍ TAXONOMIE – 9
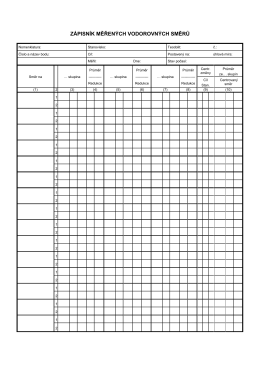
Zápisník měřených vodorovných směrů
8.990.-Kč
thesis - Theses
V této práci
25. Fourierovy řady. Diskrétní Fourierova transformace, její použití a
Turbulence
Požadavky k SZZ - Finanční matematika
Document
t - Přírodovědecká fakulta
Stručný popis poskytovaných fyzioterapeutických konceptů, metodik
– prohledávání grafů – DFS – Depth first search – BFS – Breadth
ZPRACOVÁNÍ DIGITALIZOVANÉHO OBRAZU
the document in pdf format
Modelovanie a prognózy vývoja vybraných ukazovateľov trhu práce
Petr Ferschmann FlexiBee Systems s.r.o.
RMI-Q Interface pro sondy s rádiovým přenosem signálu
Workshop - Alica Miklášová
Neprocedurální programování
Matěj Petráček Fyzikální seminář II 10.5.2012
Prednáška 2